تاریخچه EIGRP:
آموزش راه اندازی پروتکل eigrp در سیسکو : پروتکل مسیریابی EIGRP مخفف Enhanced Interior Gateway Routing Protocol است و یک پروتکل عالی است زیرا از شبکه های بزرگ پشتیبانی می کند. اگرچه IGRP در دهه 1980 قبل از EIGRP یک گزینه فناوری قابل دوام در نظر گرفته می شد، محدودیت های فنی زیادی وجود داشت. به همین دلیل، با گسترش و رشد TCP/IP در شبکه های سازمانی در دهه 1990، جهان به پروتکل های مسیریابی بهتری نیاز داشت.
پروتکل EIGRP تا سال 2012 یک پروتکل اختصاصی سیسکو بود و فقط درتجهیزات شبکه این شرکت قابل استفاده بود. با این حال، در سال 2013، سیسکو آن را به عنوان یک پروتکل استاندارد پذیرفت و اکنون می تواند در انواع تجهیزات شبکه استفاده شود.
EIGRP چیست؟
به عنوان یک مهندس سیسکو، شما باید یک پروتکل مسیریابی را برای انجام مسیریابی در یک محیط چند شبکه ای انتخاب و پیکربندی کنید. انتخاب این پروتکل مسیریابی نیاز به دانش مناسب از پروتکل های مسیریابی دارد.
همانطور که قبلا ذکر شد، پروتکل مسیریابی EIGRP پروتکل اختصاصی سیسکو است که در مقایسه با پروتکل های برداری فاصله مانند پروتکل RIP دارای نقاط قوت و مثبت بسیاری است. سیسکو تمامی ویژگی های مشترک پروتکل های Linkstate و Distance Vector را در این پروتکل ادغام کرده و آن را به یک پروتکل اختصاصی تبدیل کرده است. پروتکل EIGRP از الگوریتم DUAL استفاده می کند که از الگوریتم به روز رسانی diffusing مشتق شده است تا بهترین مسیر را انتخاب کند. یکی از جنبه های مثبت این پروتکل مسیریابی در مقایسه با پروتکل هایی مانند RIP این است که به جای ارسال کل جدول مسیریابی، تغییرات را به روترها یا روترهای همسایه ارسال می کند.
روترهایی که پروتکل EIGRP روی آنها فعال است می توانند با روترهای همسایه رابطه همسایگی برقرار کنند که اصطلاحاً به آن رابطه همسایه می گویند. این روترها از قابلیتی به نام Neighbor Discovery پشتیبانی می کنند که به هر روتر EIGRP اجازه می دهد تمام روترهای همسایه متصل به خود را شناسایی کند. روترهای EIGRP از پیام Hello برای شناسایی روترهای همسایه استفاده می کنند. یعنی روترهای EIGRP به صورت دوره ای پیام های Hello را از رابط های فعال برای شناسایی همسایگان ارسال می کنند.
توجه داشته باشید که ارسال متناوب یک پیام Hello در پروتکل مسیریابی EIGRP برای دو منظور استفاده می شود، هم برای ایجاد رابطه نزدیکی با روترهای همسایه و هم برای حفظ رابطه مجاورت با همسایگان. دریافت پیام Hello از یک روتر نشان دهنده وضعیت و عملکرد پروتکل مسیریابی EIGRP در آن روتر است.
ویژگی های کلیدی پروتکل مسیریابی EIGRP:
پیکربندی ساده و راحت
پشتیبانی می شود و می توان از آن در شبکه های LAN و WAN استفاده کرد
پشتیبانی از توپولوژی های مختلف مانند VPN، MPLS، بی سیم، خطوط اجاره ای و غیره
این یک پروتکل بدون کلاس است، به این معنی که این پروتکل اطلاعات ماسک زیر شبکه را به همراه پیام های به روز رسانی ارسالی نیز ارسال می کند. به همین دلیل این پروتکل از VLSM پشتیبانی می کند.
قابلیت مسیریابی بر روی شبکه های IP، IPX و Appletalk را دارد.
به طور خودکار روترهای همسایه را با استفاده از پیام های Hello کشف می کند که به آن Neighbor Discovery می گویند.
پروتکل مسیریابی EIGRP سرعت همگرایی بالایی دارد. سرعت همگرایی به دوره ای اطلاق می شود که در طی آن جدول مسیریابی تمامی روترهای یک سازمان یا شرکت ساخته می شود و روترها می توانند اطلاعات مسیرهای مختلف را از مسیریاب های همسایه دریافت کرده و وظیفه مسیریابی را انجام دهند.
برای به روز رسانی جدول مسیریابی، به جای پیام های پخش از پیام های چندپخشی و تک پخشی استفاده می شود که کارایی شبکه را کاهش می دهد.
از Metric پیشرفته برای انتخاب بهترین مسیر استفاده می کند. به طور پیش فرض، پارامترهای پهنای باند و تاخیر برای محاسبه متریک و انتخاب بهترین مسیر استفاده می شود.
امکان تعادل بار در 6 مسیر با مقدار مساوی و 6 مسیر با مقدار نامساوی وجود دارد.
قابلیت کار در شبکه های بزرگ و گسترده را دارد.
با پروتکل قدیمی سیسکو IGRP سازگار است.
فقط در دستگاه های سیسکو قابل استفاده است و فقط در صورتی می توانید از آن استفاده کنید که روترهای شما سیسکو باشد.
جداول پروتکل مسیریابی EIGRP:
هر روتری که دارای پروتکل مسیریابی EIGRP پیکربندی شده است دارای سه جدول به شرح زیر است:
– میز همسایه:
در این زمان روترهایی که پروتکل مسیریابی EIGRP روی آنها فعال است پیام های Hello را از روترهای همسایه ارسال و دریافت می کنند. پس از ارسال و دریافت پیام hello از روترهای همسایه، اگر AS آنها یکسان باشد، می توانند با یکدیگر ارتباط برقرار کنند. اگر روتر پس از 15 ثانیه از همسایه خود سلامی دریافت نکند، فرض می کند که روتر مشکل دارد. این زمان 15 ثانیه ای در پیکربندی پروتکل مسیریابی EIGRP زمان نگهداری نامیده می شود.
پس از دریافت پیام Hello از روترهای همسایه، روتر آن را به جدولی به نام Neighbor Table اضافه می کند.
توجه: روترهای EIGRP از قابلیتی به نام Neighbor Discovery پشتیبانی می کنند. با این قابلیت، هر روتر EIGRP قادر است تمام روترهای همسایه متصل به خود را شناسایی کند. روترهای EIGRP از پیامی به نام Hello برای شناسایی روترهای همسایه استفاده می کنند. یعنی روترهای EIGRP به صورت دورهای پیامهای Hello را از رابطهای فعال برای شناسایی همسایگان ارسال میکنند.
توجه داشته باشید که ارسال متناوب پیام Hello در پروتکل مسیریابی EIGRP برای دو منظور استفاده می شود: برای حفظ رابطه نزدیکی ایجاد شده با همسایگان استفاده می شود. در واقع دریافت پیام Hello از یک روتر نشان دهنده وضعیت و عملکرد پروتکل مسیریابی EIGRP در آن روتر است.
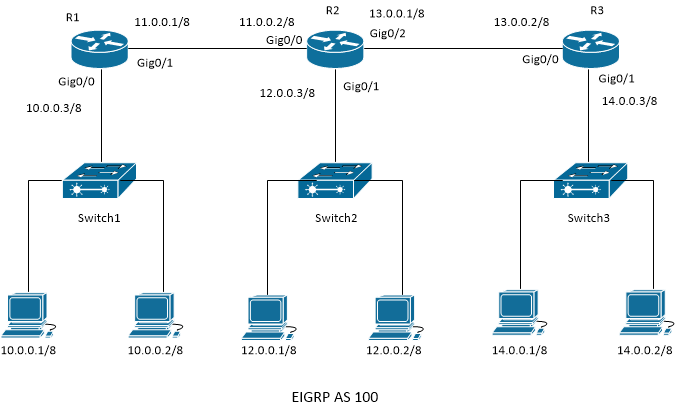
تصویر بالا ارسال پیام های Hello را بین سه روتر EIGRP نشان می دهد. به طور پیشفرض، روترهایی که پروتکل مسیریابی EIGRP را پیکربندی کردهاند، هر 5 ثانیه یکبار پیامهای Hello را برای یکدیگر ارسال میکنند. این زمان 5 ثانیه ای در پروتکل مسیریابی EIGRP، فاصله Hello نامیده می شود. اگر روتر پس از 15 ثانیه پیام Hello را از همسایه خود دریافت نکند، روتر مشکل ساز محسوب می شود. این زمان 15 ثانیه ای در پیکربندی پروتکل مسیریابی EIGRP زمان نگهداری نامیده می شود.
پس از اینکه روترهایی که پروتکل EGRP روی آنها نصب شده است پیام های Hello را بین خود ارسال و دریافت می کنند، هر روتر نام و اطلاعات روترهای همسایه را که با آنها مجاورت کرده است را به جدولی به نام Neighbor Table اضافه می کند.
– جدول توپولوژی:
پس از تکمیل جدول Neighbor Table، روترها به روز رسانی ها و مسیرهایی را که در جدول مسیریابی خود دارند به روترهایی که در نزدیکی خود راه اندازی کرده اند ارسال می کنند. به این نکته توجه کنید: روترهای EIGRP تمامی به روز رسانی ها و مسیرهای دریافتی از روترها را جمع آوری کرده و در جدولی به نام جدول توپولوژی قرار می دهند. در واقع جدول توپولوژی شامل تمام مسیرهای دریافتی برای هر مقصد است که روتر از طریق پیام های به روز رسانی از مسیریاب های همسایه دریافت کرده است.
– جدول مسیریابی:
پس از تکمیل جدول توپولوژی، الگوریتم DUAL بر روی جدول توپولوژی اجرا می شود، بهترین مسیرها را شناسایی می کند و آنها را در جدول مسیریابی قرار می دهد که به آن جدول مسیریابی می گویند.
توجه: جدول مسیریابی بهترین مسیرها را برای رسیدن به هر مقصدی قرار می دهد.
انتخاب بهترین مسیر در پروتکل EIGRP:
پروتکل مسیریابی EIGRP از الگوریتم به روز رسانی دوگانه یا انتشار استفاده می کند که از بهترین مسیر با کمترین متریک به عنوان مسیر اصلی و سایر مسیرها با کمترین متریک بعد از مسیر اصلی به عنوان مسیرهای جایگزین استفاده می کند.
پروتکل مسیریابی EIGRP از یک روش ترکیبی برای محاسبه متریک استفاده می کند. برای محاسبه متریک از روش های ترکیبی استفاده می شود. برای محاسبه متریک در EIGRP از 5 پارامتر استفاده می شود. به طور پیش فرض، 2 پارامتر برای محاسبه متریک استفاده می شود، یعنی پهنای باند و تاخیر.
EIGRP همچنین می تواند از پارامترهای دیگری مانند قابلیت اطمینان، استفاده و MTU استفاده کند که از عبارت “حداکثر واحد انتقال” گرفته شده است. اگرچه استفاده از این پارامترها می تواند شرایط بیشتری را برای محاسبه متریک بررسی کند، اما به دلیل امکان کاهش عملکرد مسیریابی، استفاده از این پارامترها توصیه نمی شود.
برای محاسبه متریک در پروتکل EIGRP:
در پروتکل مسیریابی EIGRP، مجموعه ای از پارامترهای مورد استفاده برای محاسبه متریک به عنوان مقادیر K مشخص می شود. همانطور که در تصویر زیر می بینید، هر مقدار K مربوط به پارامتری است که ممکن است در محاسبه متریک در نظر گرفته شود یا نباشد.
تنظیمات پیش فرض برای محاسبه متریک در متریک EIGRP به شرح زیر است، که در آن K1=1، K2=0، K3=1، K4=0 و K5=0. همانطور که می بینید، پارامترهای Bandwidth و Delay برای محاسبه متریک در پروتکل مسیریابی EIGRP استفاده می شوند.
در داخل، پیام های بسته Hello به صورت دوره ای از طریق روترهایی که پروتکل مسیریابی EIGRP را پیکربندی کرده اند به روترهای همسایه ارسال می شود. اگر مقدار hellos یکسان نباشد، دو روتر که پروتکل مسیریابی EIGRP روی آنها پیکربندی شده است نمی توانند رابطه مجاورت را به درستی برقرار کنند.
فرمول محاسبه متریک به شرح زیر است:
– پهنای باند: کمترین پهنای باند لینک های موجود در مسیر *256 / 10000000
– تاخیر: مجموع (تاخیر) مسیر
– EIGRP متریک: پهنای باند + تاخیر